|
|
|
|
|

|
Radio direction finder
The TD-L1706 is a mobile
radio direction finder (RDF),
developed in the late-1980s by Taiyo Musen in Japan.
The unit was intended for mobile (vehicle) direction finding and was used
by various European Radio Monitoring Services 1 for locating clandestine
radio transmitters (pirates).
|
The system consists of three parts: a processing unit
– that was usually mounted in the trunk of the car –
a compass display, and a
flat antenna
that could be mounted on (or in) the roof of the car. The device supports
two types of antennas: an adcock antenna and a smaller flat antenna.
The latter was commonly used for mobile RDF applications and is known
as EF-353. It exists in four variants, each of which covers a section
of the entire 20-1000 MHz frequency span.
In the Netherlands it was disguised
as the sunroof of the car, for which it was modified somewhat.
|
|
|
|
The antenna could be used outside its frequency range, at the price of a
performance penalty.
In the Netherlands, the TD-L1706 was first used in the late 1980s with the
PAN-1000 mobile intercept receiver.
In the mid-1990s, when the PAN-1000 was succeeded by the new
PAN-2000 system,
the TAIYO TD-L1706 was reused. Although
the TF-L1706 units have meanwhile been phased out, its EF-353 antenna
is still in use today (2018) with the latest generation
PAN-3000.
|
-
It is known that the TD-L1706 was used by the Radio Monitoring Services
of the UK and the Netherlands.
|
The diagram below shows the basic setup of the TD-1706 direction finder.
At the top left is the directional antenna, which contains four
directive elements that are switched in quick rotational order
by the switcher. The output of the switcher is amplified and passed to
an external receiver, which is not part of the system.
Switcher and pre-amplifier are both integrated with the antenna.
At the bottom is the main unit,
or controller. It controls the
speed and the order in which the antennas are switched. Furthermore,
it takes the bare 10.7 MHz or 455 kHz IF output from the receiver
and converts it to the angle of incidence of the signal, based on
amplitude variations between the four antennas.
The calculated angle is then passed to the compass display.
|
|
The TAIYO TD-L1706 was developed primarily for use aboard ships, for
finding the direction to a beacon and for locating fish. It was soon
discovered however, that the device was also suitable for locating
(clandestine) transmitters on land, not least because of its
very compact antenna.
|
The TD-L1706 and its antenna appeared to behave very well in an urban
environment and it was found that the antenna could be integrated in the
roof of the car, disguised as a sunroof.
In fact, it behaved so well, that it was reused in the mid-1990s
with the successor of the PAN-1000. The image on the right shows the new
PAN-2000
with replaced the PAN-1000. It was used from the mid-1990s to approx. 2007.
The TD-L1706 and its display are at the far right.
➤ More about the PAN-2000
|
|
|
Hiding the antenna in the sunroof of the car was not easy. First of all
the antenna was slightly bigger than the opening of the sunroof, so that
part of the metal flange had to be milled-off. This later became a standard
factory-modification. Furthermore, it is extremely important for a good
operation of the antenna, that it has sufficient grounding, and that there
are no discontinuities in its vicinity that can act as a parasitic antenna.
Such parasites will seriously affect the accuracy.
Although the TD-L1706 has meanwhile been phased-out at the
Dutch Radio Monitoring Service,
its EF-353 antenna is still in use today (2018)
with their PAN-3000.
For this reason, the EF-353 antennas have not yet ended up on the surplus
market, like the PAN-1000
and PAN-2000 have.
|
|
Central to the TD-L1706 system is the main unit or
controller. It measures approx. 25 × 22 × 14.5 cm, with the front
panel sticking out in all directions. It does not
have any direct controls. All connections are on one side of the unit,
as shown in the image below. At the Radio Monitoring Service, this unit
was usually mounted in the trunk of the vehicle, close to the external
receiver.
|
The unit is powered by 12V DC, which should be applied to the 2-pin
socket (1) at the left. The connectors for this socket are now
obsolete and will be very difficult to find. In our case, it was
replaced by a regular 3-pin male XLR socket
that is wired according to the regular conventions.
The directional antenna should be connected to the large
15-pin HIROSE connector
at the right (2). Suitable plugs for this socket are
obsolete now, but might be available from surplus stock.
The compass display should be wired 1:1 to the
9-pin female (DE9/F) socket
at the top right (3).
|
|
|
At the bottom right is a BNC socket for the input of the 10.7 MHz
IF signal from the receiver (4).
As the wiring of this socket appeared
to be picking up interference from the digital parts of the unit,
the Dutch RCD removed the wiring to this socket
and added a new socket at the top left (5), close to the actual
IF amplifier board. They also added an additional filter to the IF input
and changed the values of some components on the IF amplifier
board to improve its behaviour.
|
|
The angle of incidence of the intercepted signal, as calculated by
the main unit (shown above), is visible on the compass display
shown in the image on the right. The unit measures 125 x 110 x 50 mm
and can be mounted at a convient place on the dashboard of the car,
close to the driver.
|
The compass has a 3-digit red LED display at the center, and a circle
with 72 red LEDs around it. When the angle is calculated, the exact
angle is shown on the 3-digit display. Furthermore, the LED in the
circle that corresponds to the exact angle, will be lit, so that the driver
has a quick indication of the appropriate driving direction.
The compass display shown here, has been modified so that the 3-digit
display the center can be turned off when it attracts too much attention
or when it is not stable. For this reason, a
switch has been added at the left side.
|
|
|
|
The display is connected to the DE9/F socket marked DISPLAY at the
front panel of the main unit, via a long cable. If this cable is too
long, it might affect the stability of the display, in which case the
filtering components (mounted behind the DE9/F socket on the main unit)
may have to be altered. The wiring of this cable
is available below, and consists of address and data lines.
|
|
|
Flat antenna
EF-353 - wanted item
|
|
|
|
Several directional antennas were available for the TAIYO TD-L1706,
but it was generally
used with the so-called flat antenna — EF-353 — shown in the image below.
This antenna is suitable for 30 MHz to 500 MHz,
and even works outside this range, albeit with a reduced performance.
|
The patented antenna [B] consists of a circular metal tub with a plastic top.
Inside the tub are four directive antennas in a special arrangement.
At the bottom of the tub is a rotational switcher — that selects one of the
antennas under control of the TD-L1706 — and an RF pre-amplifier.
The output of the pre-amplifier is fed to the antenna input of an external
receiver which is not part of the system. Basically, any type of communications
receiver can be used, as long as it has a direct output of its 10.7 MHz or
455 kHz IF stage. A good example is the
ICOM IC-R9000.
|
|
|
|
The output of the antenna resembles that of a (physically) fast rotating
antenna, and will result in amplitude variations of the 10.7 MHz IF signal
from the receiver. By using an AM detector, the envelope of this fluctuating
signal is extracted, after which the microcontroller does the rest.
|
|
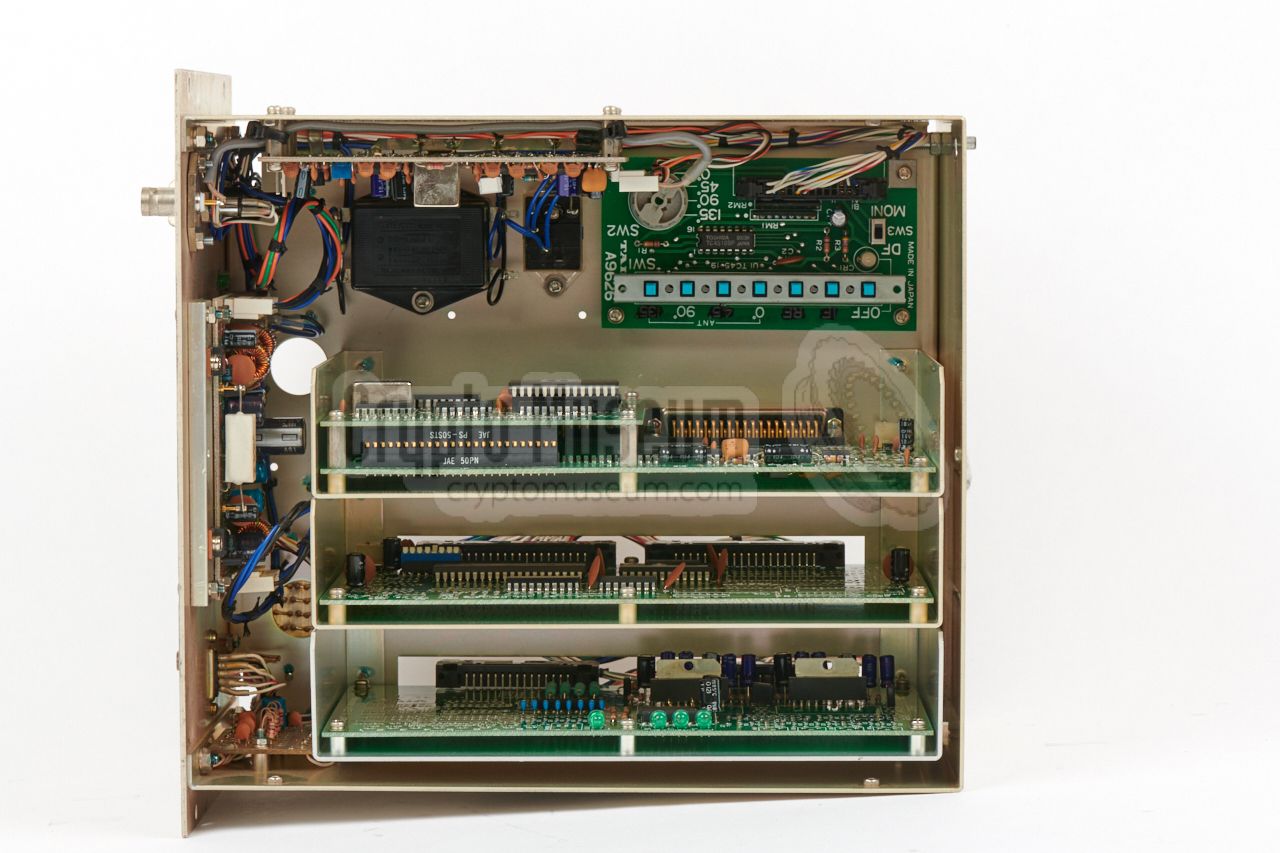
The interior of the TD-L1706 main unit can be accessed by removing the
top and bottom lids from the case, each of which are held in place by
5 screws. The top lid gives access to the printed circuit boards (PCBs),
whilst the bottom lid covers the backplane connectors and some wiring.
|
The image on the right shows the three basic modules of the system.
Front left to right: the processor board (with a half-size daughter card,
the I/O board and the Antenna Drive board.
Mounted to the left side of the case is the
IF input amplifier,
for which an extra input was added at the top left of the front panel.
Behind the IF amplifer – mounted to the bottom of the case – is the
test board. The latter can be used to verify
the operation of each of the antennas.
A small voltage regulator board
– known as the AVR – is mounted to the rear of the front panel.
|
|
|
|
The device is powered by 12V DC, typically from the battery of a boat or car.
This voltage is internally converted to 9V for the analogue parts and 5V
for the digital circuits. The 9V voltage is also supplied to the switcher
inside the antenna, via the 15-way HIROSE connector
at the front.
|
The diagram below shows the construction of the antenna. It is housed
in a disc-shaped metal tub, which is closed with a plastic sheet at the top.
Inside the tub are four antennas in a circular arrangement, each pointing
to one of the four main compass axes (N, W, S and E), relative to the
position of the vehicle. Each antenna is fed at the outer edge and is terminated
at the center of the disc with a 50Ω resistor to ground.
All antenna cables must have exactly the same length.
At the centre of the disc, below the antenna strips, is a metal cone that
keeps the impedance constant in the tapered part of the antenna. The four
coaxial cables to the antennas are fed through the bottom of the disc and
are guided to the top by a metal pipe. The shield of the coaxial cable is
connected to ground at the top of the guiding pipe. The other end of the
four coaxial cables are joined in the switcher, which is mounted at the
bottom of the disc, together with the RF pre-amplifier. The output of the
pre-amplifier is connected to the (external) receiver.
|
IF Amplifier A9642 I/O A9618 CPU (main) A7373 CPU (plug-in) A7344 Antenna drive A9612 Test board A9626 AVR A9641 Filter 1 340895A Filter 2 340895A
|
In Radio Direction Finding (RDF),
there are many different techniques
that can be used to get the bearing to a transmitter. Well-known
principles are – for example – Doppler,
Adcock
and Homer.
The TD-L1706 uses a different principle that is based on amplitude
variations in the received signal, caused by a fast rotating antenna.
This is known as the Angle of Arrival method (AoA).
Rather than using a physically fast rotating antenna – which would be
difficult to implement – the TD-L1706 uses four or eight antennas that
are switched in quick succession.
This method is also known as pseudo-rotation.
In case of the TAIYO EF-353, which is used here, four small Beverage-Antennas
are used, each of which covers a 90 degree segment, or quadrant,
of a full circle.
The Beverage antenna was invented in 1920 by Harold H. Beverage
when working for the General Electric Company (GEC) and is explained in
US Patent 1,381,089 [3].
It was enhanced by Beverage in 1938 —
meanwhile working for the
Radio Corporation of America (RCA) — as
filed in US Patent 2,247,743 [4].
The antenna is basically an open
transmission line which is terminated at the end, as shown in the
diagram above. When properly terminated (R), it has a great directivity
as shown in the directional diagram above, with the highest sensitivity in
the direction of the feedpoint [4].
In the EF-353, four Beverage antennas are used, each pointing to one
of the four main compass directions (N, E, S and W), and fed at the outer edge.
The diagram above shows the antennas as seen from the top, each with its
own directional diagram. Now assume a transmitter is placed at, say, 20°
east from the north, then each antenna will give a different signal strength,
illustrated above with red arrows. When we switch the antennas in quick succession
– typically at a speed of 135 Hz – the amplitude of the intercepted signal into
the receiver will vary accordingly, like this:
The same fluctuations in signal strength can be observed in the 10.7 MHz
IF signal from the receiver, which can be regarded as a form of Amplitude
Modulation (AM). The better the directivity of the antenna, the higher
the AM modulation depth of the observed IF signal.
Applying this 10.7 MHz IF signal to an AM-detector and passing
the resulting signal through a low-pass filter, will result in an
envelope that resembles the shape of a sine wave (here shown in red).
After removing the DC-component, the signal will look like this:
By finding the zero-crossings and examining the direction of the tangent
at these points, the software in the microprocessor is now able to determine
the offset from the start position. As the fast 135 Hz pseudo-rotation is
also under control of the microprocessor, this can
be translated directly into the angle of incidence of the intercepted signal.
As the calculated angle might have an error – typically caused by delays
in the IF circuitry – DIP switches are present to set an offset.
In reality, the way in which the antennas of the TD-L1706 are switched
is slightly more complex than explained above. The antenna's are not
selected one-at-a-time, but always in pairs (NE, ES, SW and WN). This
results in a higher signal level, a smoother AM-signal, and
a 45° offset in the measured angle. The latter is compensated in the
software of the microprocessor.
➤ More about the Angle of Arrival direction finder
|
|
The TD-L1706 requires an operating voltage of approx. 12V DC, which should
be connected to the 2-pin Tajimi 16R-2M socket at the front panel. As this
type of connector became obsolete many years ago, it may be difficult to
find a suitable plug for it. Looking into the socket:
|
- (-) Battery (GND)
- (+) Battery (+12V DC)
|
|
|
As the power socket on the device is now obsolete, it might be a good idea
to replace it with a more common 3-pin male XLR socket, similar to the one
on the 12V DC power input of the PAN-2000 FFT Processor. We have done this
on the device featured here. Pinout is now as follows:
|
- (+) Battery (+12V DC)
- (-) battery (0V)
- n.c.
|
|
- To pin 1 of compass display
- To pin 2 of compass display
- To pin 3 of compass display
- To pin 4 of compass display
- To pin 5 of compass display
- To pin 6 of compass display
- To pin 7 of compass display
- To pin 8 + 9 of compass display
- To pin 10 + 11 of compass display
|
|
|
The CONT socket on the front panel of the main TD-L1706 unit, is for
connection to the EF353 antenna. It carries the power and control lines
for the antenna (not the antenna signal itself). The socket is a HIROSE
RM21TR-15P. The plug needed for this socket is RM21WTP-15S. When using the
flat antenna (which is the case here), only the 4 wires indicated with an
arrow are needed.
|
- 0° ←
- 45°
- 90° ←
- 135°
- n.c.
- n.c.
- B1 (?)
- B2 (?)
- B3 (?)
- n.c.
- n.c.
- +9V ←
- +9V
- GND ←
- GND
|
|
The TD-L1706 should normally be fed with the 455 kHz or 10.7 MHz
IF signal from a monitoring or communications receiver, which should
be applied to the BNC socket at the bottom right of the front panel.
As the Dutch Radio Monitoring Service found this input inadequate,
their TD-L1706 units were modified with a new IF input circuit that
has its socket at the top left of the panel [2].
|
- Nico van Dongen (PA3ESA), PAN-2000 and system description
Crypto Museum, July 2018.
- AT/RCD technician, Personal correspondence
April 2018 — August 2018.
- Harold H. Beverage, US Patent 1,381,089
Filed 10 April 1920 on behalf of GEC.
- Harold H. Beverage, US Patent 2,247,743
Filed 10 December 1938 on behalf of RCA.
- Karl Rothammel, Rothammels Antnnenbuch (German), Beverage-Antenne
12th edition, 2001-2002. ISBN 3-88692-033-X. Chapter 11.2.2, p. 255.
|
|
|
|
Any links shown in red are currently unavailable.
If you like the information on this website, why not make a donation?
© Crypto Museum. Created: Thursday 12 July 2018. Last changed: Saturday, 14 March 2026 - 20:44 CET.
|
 |

|
|
|